04/01/2023
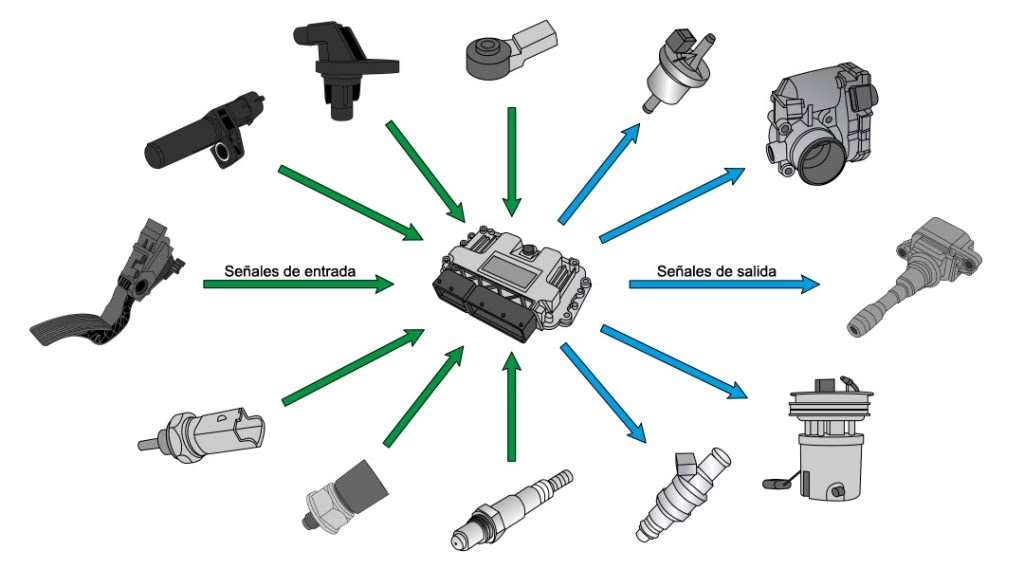
Los vehículos modernos son auténticas computadoras sobre ruedas. La cantidad de sistemas electrónicos, sensores y actuadores ha crecido exponencialmente en las últimas décadas. Desde el control del motor y la transmisión hasta los sistemas de infoentretenimiento y asistencia a la conducción, cada función requiere comunicación constante y fiable entre diferentes módulos electrónicos, conocidos como ECUs (Unidades de Control Electrónico).

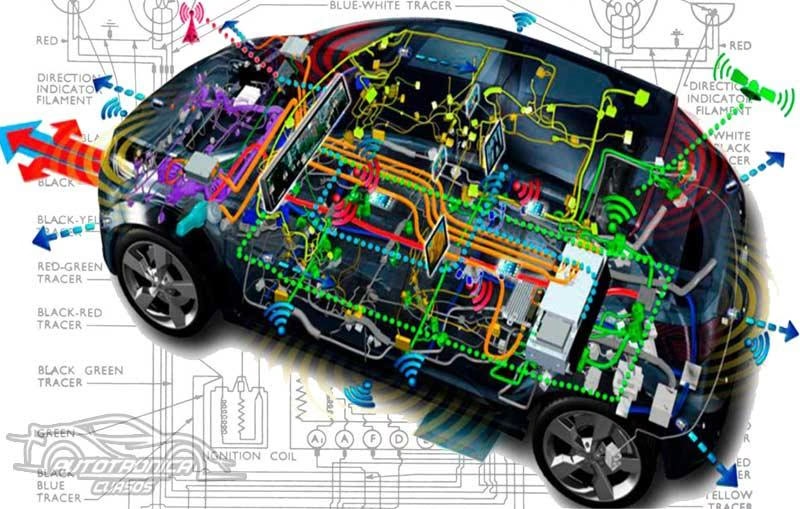
En los coches antiguos, cada señal (por ejemplo, la del sensor de temperatura al indicador del tablero) requería un cable dedicado. Con la complejidad creciente, esto llevó a arneses de cableado enormes, pesados, costosos y difíciles de fabricar y diagnosticar. Para superar este desafío, la industria automotriz adoptó el concepto de multiplexado.
¿Qué es el Multiplexado en Automoción?
El multiplexado es una técnica que permite enviar múltiples señales o flujos de datos a través de un único medio físico compartido, como un cable. En lugar de tener un cable para cada función, se utiliza un solo par de cables (o incluso uno solo en algunos casos) para transmitir información de muchos sensores o módulos a otros módulos o actuadores. La información se empaqueta y se envía secuencialmente o se codifica de manera que los receptores puedan identificar qué dato les corresponde.
La principal ventaja del multiplexado es la drástica reducción en la cantidad de cableado. Esto no solo disminuye el peso y el costo del vehículo, sino que también simplifica el proceso de fabricación y mejora la fiabilidad al haber menos conexiones propensas a fallos. Además, facilita la adición de nuevas funcionalidades y la comunicación entre diferentes sistemas que antes operaban de forma aislada.
Las Redes de Comunicación Automotriz: La Base del Multiplexado
El multiplexado en un coche no se implementa simplemente "mezclando" señales en un cable. Se basa en protocolos de comunicación específicos que definen cómo se organizan, envían, reciben e interpretan los datos. Estas son las redes de comunicación automotriz.
Existen varios tipos de redes de comunicación en un vehículo, cada una diseñada para diferentes propósitos en función de la velocidad de transmisión de datos, la criticidad de la información y el costo. Las más comunes son CAN Bus, LIN Bus, FlexRay y, más recientemente, Automotive Ethernet.
CAN Bus: El Estándar de la Industria
El CAN (Controller Area Network) Bus es, sin duda, la red más extendida en el mundo del automóvil. Fue desarrollado por Bosch a finales de la década de 1980 para permitir que las ECUs se comunicaran de forma fiable sin un host central.
Características clave del CAN Bus:
- Orientado a Mensajes: La información se envía en pequeños paquetes llamados "mensajes". Cada mensaje tiene un identificador único que indica su prioridad y contenido.
- Acceso al Bus Basado en Prioridad: Si varios módulos intentan transmitir al mismo tiempo, el mensaje con el identificador de menor valor (mayor prioridad) gana acceso al bus sin interrupción. Esto asegura que la información crítica (como la del motor o los frenos) siempre llegue rápidamente.
- Detección y Manejo de Errores: CAN tiene robustos mecanismos para detectar errores en la transmisión y reintentar el envío si es necesario.
- Velocidades: Existen diferentes variantes de CAN. CAN de baja velocidad (hasta 125 kbit/s) se usa para aplicaciones menos críticas como el control de ventanas, espejos o asientos. CAN de alta velocidad (hasta 1 Mbit/s) se utiliza para sistemas críticos como el control del motor, ABS, airbags, etc. CAN FD (Flexible Data-Rate) es una evolución que permite velocidades y tamaños de datos mayores.
- Topología: Generalmente utiliza una topología de bus lineal con terminadores en los extremos para evitar reflexiones de señal.
El CAN Bus es fundamental para la integración de sistemas críticos y ha sido un pilar del multiplexado automotriz durante décadas debido a su fiabilidad y coste razonable.
LIN Bus: Simplicidad para Periféricos
El LIN (Local Interconnect Network) Bus es una red más sencilla y de menor costo que el CAN Bus. Fue diseñada para comunicar componentes no críticos dentro de subsistemas. Piensa en él como una red local dentro de una parte del coche.
Características clave del LIN Bus:
- Maestro/Esclavo: A diferencia de CAN que es multi-maestro, LIN opera con un único nodo maestro que controla la comunicación y varios nodos esclavos que responden a las solicitudes del maestro.
- Baja Velocidad: Típicamente opera a velocidades de hasta 20 kbit/s.
- Bajo Costo: Utiliza hardware más simple y a menudo un único cable para la comunicación (además de la tierra y la alimentación), lo que lo hace ideal para componentes de bajo costo.
- Aplicaciones Típicas: Control de elevalunas, espejos eléctricos, luces interiores, sensores de lluvia, controles del volante, etc.
LIN Bus complementa a CAN Bus, manejando la comunicación de componentes menos complejos y reduciendo el costo total del sistema de cableado.
FlexRay: Alta Velocidad y Redundancia
FlexRay es una red más avanzada y costosa, diseñada para aplicaciones que requieren muy alta velocidad, determinismo (la información llega en un tiempo garantizado) y tolerancia a fallos. Se desarrolló pensando en sistemas de seguridad activa y chasis.
Características clave de FlexRay:
- Alta Velocidad: Opera a velocidades de hasta 10 Mbit/s por canal. A menudo se utiliza con dos canales redundantes para mayor fiabilidad, alcanzando un ancho de banda efectivo muy alto.
- Determinismo: Utiliza una combinación de acceso basado en tiempo (TDMA - Time Division Multiple Access) y acceso basado en evento. Esto garantiza que la información crítica llegue dentro de plazos estrictos.
- Tolerancia a Fallos: Su diseño soporta la operación con canales redundantes, lo que significa que si un canal falla, la comunicación puede continuar a través del otro.
- Aplicaciones Típicas: Sistemas de dirección asistida eléctrica (EPS), sistemas de frenado por cable (brake-by-wire), control de estabilidad avanzado, suspensión activa.
Aunque más complejo y caro que CAN, FlexRay es crucial para las aplicaciones más exigentes en términos de velocidad y seguridad.
Automotive Ethernet: El Futuro Conectado
Ethernet, la tecnología estándar para redes de computadoras, está llegando al automóvil. Sin embargo, no es exactamente el mismo Ethernet que usas en casa. El Automotive Ethernet (estándares como BroadR-Reach) está optimizado para el entorno del coche.
Características clave de Automotive Ethernet:
- Muy Alta Velocidad: Permite velocidades de 100 Mbit/s, 1 Gbit/s e incluso más.
- Gran Ancho de Banda: Necesario para manejar la enorme cantidad de datos generados por cámaras de alta resolución, radares, LiDAR y sistemas de infoentretenimiento avanzados.
- Basado en IP: Facilita la conectividad con el mundo exterior y la integración de nuevas funciones basadas en software.
- Aplicaciones Típicas: Sistemas avanzados de asistencia a la conducción (ADAS), infoentretenimiento, diagnósticos avanzados, actualizaciones de software over-the-air (OTA), cámaras de visión de 360 grados.
Automotive Ethernet es esencial para los vehículos autónomos y altamente conectados, manejando el gran ancho de banda requerido por los sensores y sistemas multimedia.
Cómo se Relacionan el Multiplexado y las Redes
Las redes de comunicación (CAN, LIN, FlexRay, Ethernet) son las tecnologías subyacentes que hacen posible el multiplexado. El multiplexado es el concepto de compartir un medio; las redes son los protocolos y el hardware que implementan ese concepto.
Por ejemplo, en un sistema CAN Bus, la información de la velocidad de la rueda, la posición del pedal del freno y el estado del sensor de guiñada (todos datos relevantes para el ABS) se multiplexan en el mismo par de cables CAN. Cada pieza de información se empaqueta en un mensaje CAN con su propio identificador. El módulo ABS, así como otros módulos que necesiten esa información, "escuchan" en el bus y extraen los mensajes que les interesan basándose en sus identificadores.
De manera similar, múltiples señales de los botones del volante (control de audio, control de crucero) pueden ser multiplexadas en un solo cable LIN que se comunica con un módulo gateway, el cual a su vez puede enviar esa información a la red CAN de alta velocidad para ser procesada por la ECU del motor o el sistema de infoentretenimiento.
Tabla Comparativa de Redes Automotrices Comunes
| Red | Velocidad Típica | Aplicaciones Comunes | Costo/Complejidad | Topología |
|---|---|---|---|---|
| LIN Bus | Hasta 20 kbit/s | Periféricos de bajo costo (ventanas, luces, asientos básicos) | Bajo | Maestro/Esclavo (Bus) |
| CAN Bus (HS) | Hasta 1 Mbit/s | Sistemas críticos (Motor, ABS, Airbag, Transmisión) | Medio | Bus Lineal |
| CAN Bus (LS) | Hasta 125 kbit/s | Sistemas de confort/carrocería (Tablero, Climatizador básico) | Medio | Bus Lineal |
| FlexRay | Hasta 10 Mbit/s (por canal) | Sistemas de seguridad activa, chasis (Dirección, Frenado por cable) | Alto | Bus/Estrella (a menudo redundante) |
| Automotive Ethernet | 100 Mbit/s a 1 Gbit/s+ | ADAS, Infoentretenimiento, Diagnóstico, Cámaras | Variable (Medio a Alto) | Punto a Punto (Switched Ethernet) |
Preguntas Frecuentes sobre Redes y Multiplexado Automotriz
¿Por qué no usar solo un tipo de red para todo?
Cada red tiene sus propias características de velocidad, coste, complejidad y fiabilidad. Usar la red adecuada para cada aplicación optimiza el rendimiento general del vehículo, reduce costos y garantiza que los sistemas críticos funcionen con la velocidad y fiabilidad necesarias.
¿Qué es una ECU?
Una ECU (Electronic Control Unit) es una pequeña computadora integrada que controla una o varias funciones eléctricas en un vehículo. Hay ECUs para el motor, la transmisión, los frenos (ABS), los airbags, el sistema de climatización, el infoentretenimiento, etc. Son los "nodos" que se comunican a través de las redes multiplexadas.
¿Cómo se diagnostican los problemas en estas redes?
Los vehículos modernos tienen puertos de diagnóstico (generalmente OBD-II, On-Board Diagnostics II) que permiten a los técnicos acceder a las ECUs y a las redes de comunicación. Utilizando herramientas de diagnóstico, pueden leer códigos de error (DTCs), monitorizar el tráfico de la red y probar la comunicación entre los módulos para identificar fallos.
¿El multiplexado afecta la latencia (retraso) en la comunicación?
Los protocolos de red están diseñados para minimizar la latencia, especialmente en redes de alta velocidad como CAN de alta velocidad o FlexRay. Las redes de baja velocidad como LIN tienen mayor latencia, pero se usan para funciones donde un pequeño retraso no es crítico. El diseño cuidadoso del sistema multiplexado asegura que la información crítica llegue a tiempo.
¿Qué es un Gateway en el contexto de las redes automotrices?
Un Gateway es una ECU especial que actúa como un puente entre diferentes tipos de redes. Por ejemplo, un Gateway puede traducir mensajes del LIN Bus a mensajes CAN Bus, permitiendo que los módulos de baja velocidad se comuniquen indirectamente con módulos de alta velocidad, o conectar la red CAN a la red Ethernet.
En conclusión, el multiplexado y las diversas redes de comunicación (CAN, LIN, FlexRay, Ethernet) son tecnologías esenciales que permiten la creciente complejidad y funcionalidad de los vehículos modernos. Han reemplazado gran parte del cableado punto a punto, mejorando la eficiencia, reduciendo el peso y el costo, y sentando las bases para las innovaciones futuras en seguridad, conectividad y autonomía. Comprender cómo se comunican las diferentes partes de tu coche te da una nueva perspectiva sobre la sofisticada ingeniería que hay bajo el capó.
Si quieres conocer otros artículos parecidos a Redes de Comunicación y Multiplexado en Autos puedes visitar la categoría Automóviles.