15/02/2025
En la era de los vehículos inteligentes y conectados, la comunicación interna entre los diferentes componentes electrónicos es tan vital como el motor o el chasis. Ya no se trata solo de un conjunto de cables que llevan electricidad de un punto a otro; los automóviles modernos son redes complejas donde decenas de unidades de control electrónico (ECU) deben intercambiar información de manera rápida, fiable y eficiente. Es aquí donde entra en juego el CAN Bus.
https://www.youtube.com/watch?v=0gcJCdgAo7VqN5tD
El CAN Bus, acrónimo de Controller Area Network (Red de Área de Controlador), es un protocolo de comunicación basado en mensajes diseñado precisamente para permitir que estas ECU se comuniquen entre sí de manera confiable y basada en prioridades. En lugar de tener una maraña de cables directos entre cada componente, el CAN Bus crea una red compartida a la que todos los dispositivos están conectados. Cada dispositivo en la red puede enviar y recibir mensajes, o 'tramas', sin necesidad de una computadora central o un host que dirija el tráfico. Esto lo convierte en un sistema distribuido y robusto.
El estándar CAN es reconocido internacionalmente y está respaldado por un amplio conjunto de normas bajo la especificación ISO 11898. Su diseño descentralizado y su énfasis en la fiabilidad lo han convertido en el estándar de facto no solo en la industria automotriz, sino en muchas otras aplicaciones donde la comunicación robusta es esencial.
¿Cómo Funciona el CAN Bus?
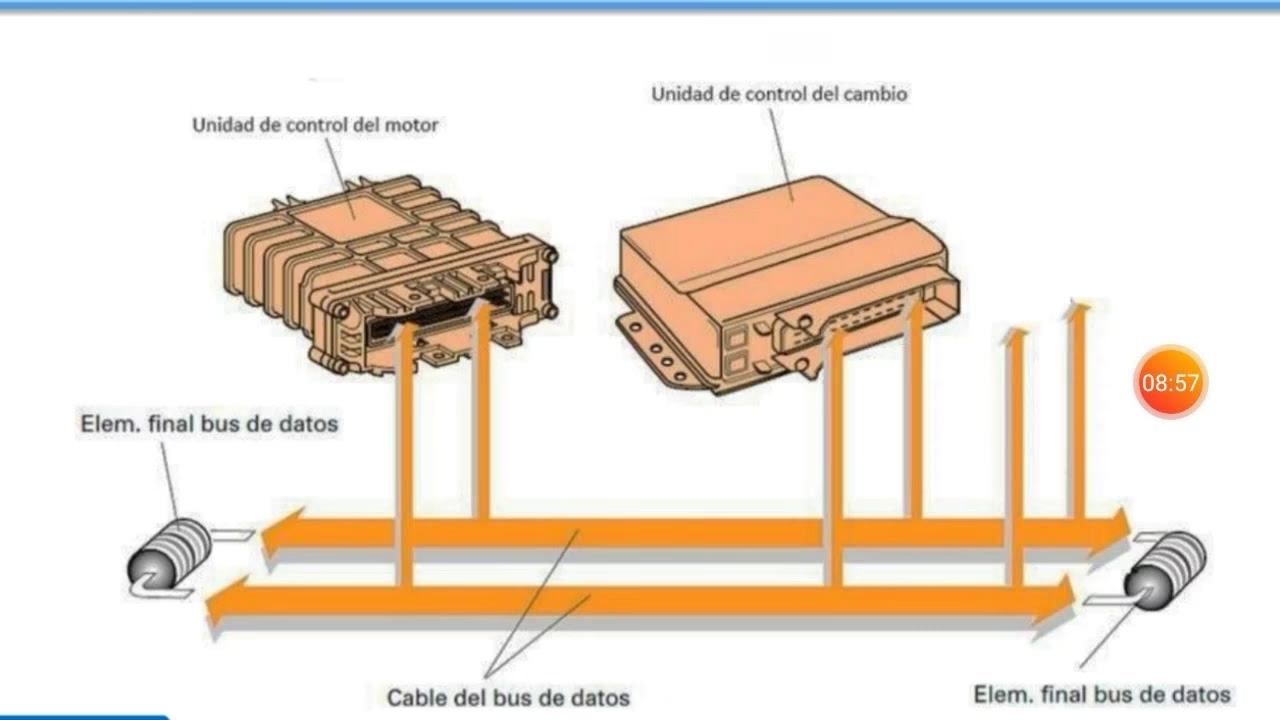
En una red CAN, cada dispositivo conectado se conoce como un 'nodo'. Un nodo CAN típico está compuesto por una CPU (que puede ser el propio microcontrolador de la ECU), un controlador CAN (un chip específico que implementa el protocolo CAN) y un transceptor (que adapta los niveles de señal para la transmisión física en el bus). Todos los nodos están conectados a un bus común, generalmente compuesto por un par de cables trenzados (CAN alto y CAN bajo).
Cuando un nodo quiere enviar datos, no los envía directamente a un nodo específico. En cambio, 'transmite' un mensaje al bus, donde está disponible para todos los demás nodos. Cada mensaje tiene un identificador único que no solo indica el tipo de datos que contiene, sino que también define su prioridad. Los mensajes con un valor de identificador más bajo tienen una prioridad más alta y, por lo tanto, tienen preferencia para acceder al bus.
La comunicación en CAN no es síncrona en el sentido de que no hay una señal de reloj compartida que dicte cuándo transmitir. Sin embargo, los nodos están sincronizados a nivel de bit para que todos muestren los datos en el bus simultáneamente. Cuando varios nodos intentan transmitir al mismo tiempo, se produce un proceso llamado arbitraje. Este arbitraje se resuelve bit a bit: cada nodo que transmite compara el bit que pone en el bus con el nivel real del bus. Si un nodo transmite un bit recesivo (generalmente un '1' lógico) pero detecta un bit dominante (generalmente un '0' lógico) en el bus (puesto por otro nodo), pierde el arbitraje y deja de transmitir, permitiendo que el mensaje de mayor prioridad (el que tiene el identificador más bajo, ya que '0' tiene mayor prioridad que '1' en el identificador) continúe sin interrupción. Esto garantiza que los mensajes críticos lleguen a su destino incluso bajo cargas de red elevadas.
Los datos se transmiten en 'tramas' o 'marcos'. Hay cuatro tipos principales de tramas en CAN:
- Tramas de Datos: Se utilizan para transferir datos reales de un nodo a uno o varios nodos receptores.
- Tramas Remotas: Un nodo receptor utiliza este tipo de trama para solicitar datos a otro nodo.
- Tramas de Error: Se envían por un nodo que detecta un error en el bus.
- Tramas de Sobrecarga: Se utilizan para informar sobre condiciones de sobrecarga en un nodo receptor.
La estructura de la trama de datos CAN es fundamental para su funcionamiento. Incluye campos como el 'Start Of Frame' (SOF), el 'Identifier' (que determina la prioridad), campos de control, el 'Data Field' (que contiene los datos útiles), un 'Cyclic Redundancy Check' (CRC) para la detección de errores, un 'ACK Slot' para que los receptores confirmen la recepción exitosa, y el 'End Of Frame' (EOF). Los identificadores pueden ser estándar de 11 bits (ofreciendo 2048 identificadores posibles) o extendidos de 29 bits (con más de 500 millones de identificadores), lo que permite una mayor flexibilidad y capacidad en redes más grandes o complejas.
CAN FD: La Evolución del Bus CAN
Con la creciente cantidad de datos generados y necesarios en los vehículos modernos (sensores avanzados, cámaras, sistemas de asistencia al conductor), la velocidad y la capacidad de datos del CAN clásico (hasta 1 Mbps y 8 bytes por mensaje) comenzaron a ser limitantes. Aquí es donde entra el CAN FD (Flexible Data-Rate).
CAN FD es una evolución del CAN clásico que aumenta significativamente tanto la longitud de los datos por mensaje como la velocidad de transmisión. Mientras que el CAN clásico limita los datos a 8 bytes por trama, CAN FD permite hasta 64 bytes, un aumento del 800%. Además, la velocidad máxima de transmisión se incrementa de 1 Mbps a hasta 8 Mbps (la velocidad exacta puede variar según la implementación y la topología de la red). La parte 'flexible' se refiere a la capacidad de los nodos para cambiar dinámicamente entre la velocidad y longitud de datos del CAN clásico (durante la fase de arbitraje) y las velocidades y longitudes de datos aumentadas de CAN FD (durante la fase de datos, si todos los nodos lo soportan). A pesar de estas mejoras, CAN FD es completamente compatible con versiones anteriores de CAN 2.0, lo que facilita su integración gradual en los sistemas existentes. Inicialmente adoptado en vehículos de alto rendimiento, se espera que CAN FD se generalice en la mayoría de los automóviles en el futuro cercano.
Breve Historia del CAN Bus
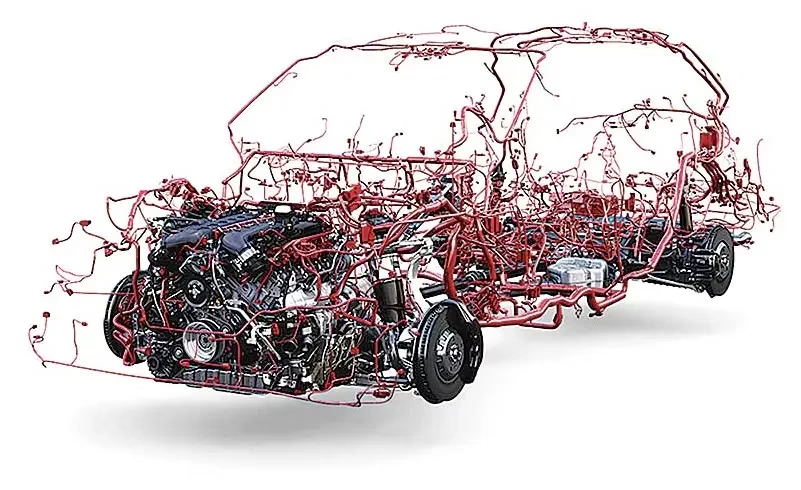
Antes del CAN Bus, los vehículos utilizaban un sistema de cableado punto a punto similar al de una casa, donde cada interruptor o sensor estaba conectado directamente al componente que controlaba. Esto resultaba en miles de cables pesados y voluminosos. En la década de 1970, la crisis del petróleo impulsó la necesidad de mejorar la eficiencia del combustible, y reducir el peso del vehículo se convirtió en una prioridad. Paralelamente, la cantidad de ECU en los automóviles aumentaba, haciendo que el cableado punto a punto fuera inviable en términos de complejidad y peso.
A principios de la década de 1980, la empresa alemana Robert Bosch GmbH comenzó a desarrollar un nuevo sistema de comunicación para abordar estos problemas, en colaboración con Mercedes-Benz, Intel Corporation y varias universidades. El objetivo era crear un bus de comunicación distribuido, fiable y que redujera drásticamente la cantidad de cableado. En 1986, Bosch presentó el estándar CAN en el Congreso SAE en Detroit. Al año siguiente, Intel lanzó los primeros chips controladores CAN, y en 1991, Mercedes-Benz fue uno de los primeros fabricantes en implementar el CAN Bus en su modelo Clase S (W140). El ahorro de peso y la simplificación del cableado fueron consecuencias muy bienvenidas de este nuevo protocolo.
Ventajas Clave del CAN Bus
La adopción masiva del CAN Bus en la industria automotriz y otras áreas se debe a sus significativas ventajas:
- Simplicidad y Bajo Costo: Las ECU se comunican a través de un único bus compartido en lugar de conexiones directas complejas. Esto reduce el cableado, el peso, la complejidad y el costo. Los chips CAN son económicos y están ampliamente disponibles.
- Totalmente Centralizado (para Diagnóstico): Aunque la comunicación es distribuida, el bus proporciona un punto de acceso centralizado para interactuar con todas las ECU de la red, lo que facilita el diagnóstico, el registro de datos y la configuración.
- Extremadamente Robusto: El sistema es altamente resistente a perturbaciones eléctricas e interferencias electromagnéticas (EMI), lo que lo hace ideal para entornos hostiles como los de un vehículo y para aplicaciones críticas para la seguridad.
- Eficiencia: El sistema de arbitraje basado en la prioridad del identificador asegura que los mensajes más importantes accedan al bus de inmediato sin esperar, optimizando el flujo de datos.
- Reducción del Peso: Al reemplazar kilómetros de cables individuales por un par de cables trenzados, se reduce significativamente el peso total del vehículo.
- Implementación Sencilla: Es un estándar probado con un amplio ecosistema de herramientas y soporte.
- Detección y Confinamiento de Fallas: El protocolo tiene mecanismos integrados para detectar errores en la transmisión y, si un nodo falla, puede entrar en un estado pasivo para no perturbar el resto de la red.
Aplicaciones Populares del CAN Bus
Aunque nació para la industria automotriz, la robustez y fiabilidad del CAN Bus lo han llevado a ser adoptado en una amplia gama de aplicaciones:
- Vehículos: Coches, camiones, autobuses, motocicletas, vehículos agrícolas y de construcción. Es el pilar de la comunicación interna.
- Telemática: Sistemas de gestión de flotas y monitoreo de vehículos pesados.
- Aeronáutica: Sistemas de control y monitoreo en aviones.
- Automatización Industrial: Maquinaria de fabricación, robótica, sistemas de control de movimiento (a menudo utilizando protocolos de capa superior como CANopen).
- Transporte Ferroviario y Marítimo: Sistemas de control y monitoreo en trenes y barcos.
- Equipamiento Médico: Dispositivos y sistemas médicos.
- Sistemas de Mantenimiento Predictivo: Recopilación de datos para monitorear el estado de la maquinaria.
- Electrodomésticos: Lavadoras, secadoras y otros dispositivos complejos.
Variaciones del Bus CAN
El estándar ISO 11898 define varias implementaciones físicas del bus CAN, siendo las más comunes en la industria automotriz:
- CAN de Baja Velocidad (ISO 11898-3): También conocido como CAN tolerante a fallas. Opera a velocidades de hasta 125 kbps. Se utiliza en aplicaciones donde la velocidad no es crítica y la tolerancia a fallas es importante, como paneles de instrumentos, elevalunas eléctricos, espejos eléctricos y controles de asiento. Si uno de los dos cables del par trenzado se daña, la comunicación puede continuar (aunque a una velocidad reducida o con limitaciones).
- CAN de Alta Velocidad (ISO 11898-2): Opera a velocidades de hasta 1 Mbps. Es la variante más común y se utiliza para subsistemas críticos que requieren comunicación rápida y precisa, como el sistema de frenos antibloqueo (ABS), control electrónico de estabilidad (ESP), sistemas de airbag, unidades de control del motor (ECU motor) y transmisión. Requiere terminadores en ambos extremos del bus para funcionar correctamente.
- CAN FD: Como se explicó anteriormente, esta es la evolución que permite mayores velocidades (hasta 8 Mbps) y mayores cargas de datos (hasta 64 bytes) manteniendo la compatibilidad con CAN clásico. Se utiliza en aplicaciones que requieren un gran ancho de banda, como algunos sistemas avanzados de asistencia al conductor (ADAS) y en vehículos de alto rendimiento.
Protocolos de Capa Superior sobre CAN
CAN por sí solo es un protocolo de capa de enlace de datos y física; define cómo se transmiten los bits y las tramas, pero no qué significan los datos dentro de la trama. Para dar significado y estructura a la información, se han desarrollado varios protocolos de capa superior que se ejecutan 'sobre' CAN:
- SAE J1939: Desarrollado principalmente para vehículos comerciales pesados (camiones, autobuses) en América del Norte, pero adoptado globalmente. Define cómo se empaquetan los datos del tren motriz, frenos, diagnósticos, etc., dentro de las tramas CAN extendidas (29 bits). Asigna identificadores específicos a parámetros como RPM del motor, temperatura, presión, etc.
- OBD II (On-Board Diagnostics II): Es un estándar para el diagnóstico de vehículos que se hizo obligatorio en EE. UU. a partir de 1996 (y luego en otros países). Utiliza un conector estandarizado (el famoso conector de 16 pines) y varios protocolos de comunicación subyacentes, siendo CAN (en sus variantes de alta velocidad y FD) el más común en vehículos modernos. Permite a las herramientas de diagnóstico leer códigos de falla (DTCs), datos en tiempo real (velocidad, RPM, temperatura, etc.) y realizar pruebas.
- CANopen: Un protocolo de capa superior utilizado en sistemas de control integrado y automatización industrial. Define perfiles de dispositivo estandarizados (por ejemplo, para E/S, control de movimiento) y modelos de comunicación (como Cliente/Servidor o Productor/Consumidor) para garantizar la interoperabilidad entre dispositivos de diferentes fabricantes. Utiliza un 'Diccionario de Objetos' para describir los parámetros y datos de cada dispositivo.
- XCP/CCP: Protocolos utilizados principalmente para calibración y adquisición de datos en ECU durante el desarrollo y prueba. XCP (Universal Measurement and Calibration Protocol) es la evolución de CCP (CAN Calibration Protocol) y puede ejecutarse sobre varios buses, incluyendo CAN y CAN FD. Permiten acceder y modificar parámetros internos de la ECU y leer datos detallados a altas velocidades.
CAN Bus vs. Otros Buses de Vehículos
Aunque CAN es dominante, los vehículos modernos utilizan una combinación de diferentes buses, cada uno optimizado para tareas específicas. Aquí una comparación con algunos otros protocolos comunes:
| Característica | LIN | CAN | CAN FD | FlexRay | MOST | Automotive Ethernet |
|---|---|---|---|---|---|---|
| Velocidad Típica | 10-20 kbps | Hasta 1 Mbps | Hasta 8 Mbps | Hasta 10 Mbps | 25-150 Mbps (compartido) | 100 Mbps - 1 Gbps+ (por nodo) |
| Tamaño de Datos por Mensaje | 8 bytes | 8 bytes | Hasta 64 bytes | Hasta 254 bytes | Variable (orientado a streams) | Hasta 1500 bytes |
| Cableado | 1 cable + Alimentación/Tierra | Par trenzado sin blindaje (UTP) | UTP | UTP | Fibra óptica o UTP | UTP |
| Topología Principal | Maestro/Esclavo, Bus | Bus | Bus | Bus, Estrella, Mixta | Anillo, Estrella virtual | Estrella, Árbol |
| Uso Típico | Sensores simples, actuadores básicos (ventanas, luces, cerraduras) | Tren motriz, chasis, carrocería, diagnóstico | Tren motriz avanzado, ADAS, diagnóstico de alta velocidad | Control de chasis, dirección asistida, aplicaciones de seguridad críticas | Sistemas de infoentretenimiento y multimedia | ADAS, cámaras, sensores de alta resolución, diagnóstico de alta velocidad, backbone |
| Detección de Errores | CRC de 8 bits | CRC de 15 bits | CRC de 17 o 21 bits | CRC de 24 bits | CRC, mecanismos de capa superior | CRC de 32 bits |
| Redundancia | No | No | No | Opcional (doble canal) | Sí (anillo) | Opcional a nivel de sistema |
| Determinismo | Limitado | Basado en prioridad (arbitraje) | Basado en prioridad (arbitraje mejorado) | Alto (basado en tiempo - TDMA) | Orientado a stream isócrono | Alto con TSN (Time-Sensitive Networking) |
| Costo | $ | $$ | $$ | $$$ | $$ | $$ |
La elección de un bus u otro depende de los requisitos específicos de la aplicación en términos de velocidad, cantidad de datos, criticidad, determinismo, tolerancia a fallas y costo. CAN ofrece un excelente equilibrio para la mayoría de las necesidades generales de comunicación en el vehículo.
Preguntas Frecuentes sobre el CAN Bus
A continuación, respondemos algunas de las preguntas más comunes sobre el CAN Bus:
¿Qué es exactamente el CAN Bus?
El CAN Bus es un protocolo de comunicación digital utilizado principalmente en la industria automotriz y otras áreas para permitir que las unidades de control electrónico (ECU) se comuniquen entre sí de manera eficiente y confiable a través de una red compartida, minimizando el cableado.
¿Para qué se utiliza el CAN Bus en un coche?
Se utiliza para que las diferentes ECU (como la del motor, transmisión, frenos, airbags, tablero, etc.) intercambien datos e instrucciones. Por ejemplo, la ECU del motor informa las RPM, la ECU de frenos informa si se está frenando, y la ECU del tablero utiliza esta información para mostrarla al conductor.
¿Qué coches tienen CAN Bus?
La gran mayoría de los vehículos fabricados a partir de mediados de la década de 2000 (aproximadamente desde 2004-2005) en adelante utilizan CAN Bus como su principal red de comunicación interna, especialmente para los sistemas críticos. Los vehículos más antiguos utilizaban principalmente cableado punto a punto o protocolos seriales más simples. La implementación varía según el fabricante y el año, pero es un estándar global.
¿Qué datos puedo obtener del CAN Bus de un vehículo?
Los datos disponibles varían según el vehículo, el fabricante y el año, pero comúnmente se pueden obtener parámetros como: Velocidad del vehículo, RPM del motor, Posición del acelerador, Temperatura del motor, Nivel y consumo de combustible, Distancia total (cuentakilómetros), Carga del motor, Presión de frenos, Estado de las puertas y ventanas, Temperatura exterior, y muchos otros datos de sensores y actuadores.
¿Qué pasa si falla el CAN Bus?
El CAN Bus está diseñado para ser muy robusto. Tiene mecanismos integrados de detección de errores (como CRC) y confinamiento de fallas. Si un nodo detecta un error repetidamente, puede entrar en un estado 'error passive' o incluso 'bus off' para evitar interferir con el resto de la red. Sin embargo, si hay un daño físico severo en el cableado del bus principal o una falla en un componente crítico que afecta a todo el bus, la comunicación entre múltiples ECU puede interrumpirse, lo que puede causar fallas en cascada en el vehículo y encender luces de advertencia en el tablero. Los sistemas críticos a menudo tienen cierta redundancia o modos de funcionamiento seguro en caso de falla del bus.
Conclusión
El CAN Bus ha revolucionado la arquitectura electrónica de los vehículos, pasando de sistemas cableados punto a punto a redes de comunicación distribuidas y eficientes. Su fiabilidad, robustez y capacidad para manejar comunicaciones prioritarias lo han convertido en un pilar fundamental en la industria automotriz y más allá. Con la llegada de CAN FD, el protocolo continúa evolucionando para satisfacer las crecientes demandas de ancho de banda de los vehículos modernos y futuros, asegurando que la comunicación interna siga siendo tan avanzada y confiable como el resto de la tecnología a bordo.
Si quieres conocer otros artículos parecidos a CAN Bus: El Sistema Nervioso de tu Vehículo puedes visitar la categoría Automovilismo.