01/05/2022
Cuando conduces tu coche y giras el volante para tomar una curva, das por sentado que el vehículo seguirá la trayectoria deseada de forma suave y controlada. Sin embargo, detrás de esa aparente simplicidad se esconde un principio fundamental de la mecánica automotriz que es crucial para la estabilidad, la maniobrabilidad y la eficiencia del vehículo: la geometría de dirección Ackermann. Este ingenioso diseño asegura que cada rueda delantera gire exactamente en el ángulo correcto para negociar la curva sin deslizamientos innecesarios.
https://www.youtube.com/watch?v=0gcJCdgAo7VqN5tD
La dirección es, sin duda, uno de los sistemas más vitales de un automóvil. Permite al conductor guiar el vehículo, cambiar de carril, sortear obstáculos y, fundamentalmente, tomar curvas. Si te detienes a pensarlo, las ruedas delanteras no solo cambian su orientación lineal, sino que también deben adaptarse a la trayectoria circular que describe el coche al girar. Aquí es donde entra en juego el principio de Ackermann, un elemento a menudo invisible pero indispensable para el correcto funcionamiento de cualquier vehículo moderno.

- ¿Qué es el Principio de Ackermann?
- ¿Por Qué es Necesario que las Ruedas Giren a Ángulos Diferentes?
- Breve Historia: Los Genios Tras la Idea
- Cómo Funciona el Sistema de Dirección con Ackermann
- Ventajas de la Geometría Ackermann en Coches de Calle
- Posibles Inconvenientes
- Ackermann en el Mundo de la Competición: Un Giro Inesperado
- Ackermann vs. Anti-Ackermann (o Ackermann Inverso)
- El Nivel de Ackermann: Un Compromiso de Diseño
- Factores Adicionales en la Geometría de Dirección
- Preguntas Frecuentes sobre el Principio de Ackermann
- Conclusión
¿Qué es el Principio de Ackermann?
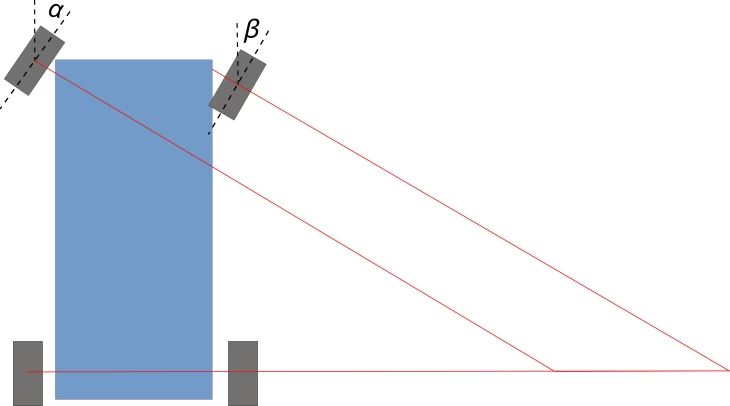
En su esencia más simple, el principio de dirección de Ackermann postula que, durante un giro, las ruedas delanteras de un vehículo deben girar a ángulos ligeramente diferentes. Específicamente, la rueda interior (la que está más cerca del centro de la curva) debe girar con un ángulo mayor que la rueda exterior (la que está más lejos del centro de la curva). Este concepto geométrico es fundamental para asegurar que todas las ruedas sigan trayectorias que se cruzan en un punto común, conocido como el centro instantáneo de giro. Cuando esto ocurre, las ruedas están en una condición de 'rodadura pura', minimizando el deslizamiento lateral y el desgaste de los neumáticos.
Imagina que trazas un círculo con un compás. El punto fijo es el centro del círculo, y la punta que dibuja es la trayectoria. En un coche girando, cada rueda describe su propio círculo, pero todos estos círculos deben compartir el mismo centro. Las ruedas delanteras, al ser las que dirigen, deben orientarse de tal manera que sus ejes (proyectados) se encuentren en ese centro común. Dado que la rueda interior recorre un radio de giro menor que la rueda exterior, necesita 'apuntar' más hacia el centro, es decir, girar con un ángulo mayor respecto a la línea recta.
¿Por Qué es Necesario que las Ruedas Giren a Ángulos Diferentes?
La necesidad de que las ruedas giren a ángulos distintos surge directamente de la geometría de un giro. Cuando un vehículo se mueve en línea recta, ambas ruedas delanteras están paralelas entre sí y perpendiculares al eje longitudinal del coche. Sin embargo, al iniciar una curva, el vehículo completo traza un arco circular alrededor de un punto central. Las ruedas interiores (delantera y trasera) recorren un arco de menor radio, mientras que las ruedas exteriores recorren un arco de mayor radio.
Para que las ruedas rueden sin deslizarse lateralmente (lo cual generaría fricción, desgaste, pérdida de control y tensión en los componentes), los ejes de todas las ruedas, si se extendieran infinitamente, deberían converger en el mismo punto: el centro instantáneo de giro. Si las ruedas delanteras estuvieran siempre paralelas entre sí, como en línea recta, al intentar girar, la rueda interior intentaría seguir un radio demasiado grande para su posición, y la exterior intentaría seguir uno demasiado pequeño. Esto causaría que ambas ruedas se arrastraran lateralmente, lo que se conoce como 'deslizamiento'. El principio de Ackermann resuelve este problema al permitir que la rueda interior gire más, alineando su eje proyectado correctamente con el centro de giro, y haciendo lo mismo con la rueda exterior, pero con un ángulo menor.
Breve Historia: Los Genios Tras la Idea
Aunque el sistema lleva el nombre de Rudolf Ackermann, la idea original y el diseño geométrico se atribuyen a otro ingeniero alemán, Georg Lankensperger. Lankensperger desarrolló este sistema a principios del siglo XIX, pensando inicialmente en su aplicación para carruajes tirados por caballos. En aquella época, los carruajes giraban pivotando el eje delantero completo en su centro, lo que era inestable y limitado en ángulo. La idea de Lankensperger de permitir que cada rueda delantera girara independientemente respecto al chasis fue revolucionaria.
Fue Rudolf Ackermann, sin embargo, quien vio el potencial comercial del invento. Compró la patente a Lankensperger y la registró en Inglaterra en 1818, con el objetivo de facilitar su comercialización en un mercado más amplio. Aunque la historia le ha dado el nombre, es justo reconocer la genialidad de Lankensperger en la concepción inicial de esta geometría fundamental. Desde entonces, el principio de Ackermann ha sido la base de casi todos los sistemas de dirección de vehículos de ruedas.
Cómo Funciona el Sistema de Dirección con Ackermann
El sistema de dirección de un coche es un conjunto complejo de componentes mecánicos y, en vehículos modernos, también electrónicos e hidráulicos o eléctricos. El principio de Ackermann se implementa a través de la geometría de las barras de acoplamiento (también llamadas tirantes o brazos de dirección) que conectan las manguetas (donde se montan las ruedas) con la cremallera de dirección.
Cuando el conductor gira el volante, este movimiento se transmite a través de la columna de dirección a la caja de dirección, que en los coches modernos suele ser una cremallera. La cremallera transforma el movimiento rotacional del volante en un movimiento lineal horizontal. Este movimiento lineal empuja o tira de las barras de acoplamiento. Las barras de acoplamiento no están montadas paralelas al eje transversal del coche, sino que están inclinadas de tal manera que sus puntos de anclaje en las manguetas (los pivotes o rótulas) están más cerca del centro del vehículo que los pivotes de giro de la propia mangueta.
Debido a esta inclinación y a la forma en que se mueven las barras al desplazarse la cremallera, cuando la cremallera se mueve hacia un lado (para girar, por ejemplo, a la derecha), la barra de acoplamiento del lado interior (derecho) se mueve en un arco que la hace girar más que la barra de acoplamiento del lado exterior (izquierdo). Esta diferencia en el movimiento angular de las barras se traduce directamente en una diferencia en el ángulo de giro de las ruedas delanteras, logrando así la geometría Ackermann deseada. La precisión de esta geometría es clave para el comportamiento del coche.
Ventajas de la Geometría Ackermann en Coches de Calle
La implementación correcta del principio de Ackermann ofrece múltiples beneficios para los vehículos de uso cotidiano:
- Maniobrabilidad Mejorada: Permite que el coche gire de manera más suave y controlada, especialmente a bajas velocidades y en curvas cerradas. Esto facilita enormemente las tareas como estacionar en espacios reducidos o navegar por calles estrechas.
- Reducción del Desgaste de Neumáticos: Al asegurar que las ruedas rueden sin deslizarse lateralmente, se minimiza la fricción innecesaria entre el neumático y la superficie de la carretera. Esto reduce significativamente el desgaste de los neumáticos, prolongando su vida útil y optimizando su rendimiento.
- Mayor Estabilidad a Bajas Velocidades: Al evitar el deslizamiento, el coche se siente más plantado y estable al girar a velocidades moderadas o bajas, contribuyendo a una sensación de seguridad para el conductor.
- Menor Esfuerzo en la Dirección: Al minimizar la fricción del deslizamiento, el sistema de dirección requiere menos esfuerzo para girar las ruedas, lo que se traduce en una dirección más ligera y cómoda, especialmente en vehículos sin asistencia eléctrica o hidráulica, o al maniobrar en parado.
En resumen, la geometría Ackermann es fundamental para el comportamiento predecible y eficiente de la dirección en el uso diario.
Posibles Inconvenientes
Aunque las ventajas superan con creces los inconvenientes para la mayoría de las aplicaciones de calle, el sistema Ackermann perfecto (100% Ackermann) puede presentar algunos desafíos, especialmente a velocidades más altas o en situaciones de conducción deportiva:
- Tensión en Neumáticos a Alta Velocidad/Curvas: A velocidades elevadas, los neumáticos generan fuerzas laterales significativas para mantener el coche en la curva. En estas condiciones, el comportamiento de los neumáticos se rige más por los 'slip angles' (ángulos de deslizamiento) que por la rodadura pura ideal de Ackermann. Un Ackermann excesivo a alta velocidad puede generar tensiones internas en los neumáticos o incluso una pequeña pérdida de adherencia, ya que la geometría ideal de baja velocidad ya no es la óptima.
- Compromiso de Diseño: Diseñar un sistema que ofrezca un Ackermann "perfecto" en todo el rango de giro y para todas las condiciones es complejo. Los diseñadores a menudo deben encontrar un compromiso que funcione bien en la mayoría de las situaciones de conducción previstas para el vehículo.
Estos puntos nos llevan al interesante mundo de la competición, donde las prioridades cambian drásticamente.
Ackermann en el Mundo de la Competición: Un Giro Inesperado
Si bien el principio de Ackermann es indispensable para los coches de calle, en el ámbito de las carreras de alta velocidad, las reglas del juego cambian. En un coche de carreras, el objetivo principal no es la rodadura pura a baja velocidad, sino maximizar la fuerza lateral que los neumáticos pueden generar para negociar las curvas a la mayor velocidad posible. Aquí es donde el concepto de 'slip angle' o ángulo de deslizamiento se vuelve crucial.
Un neumático genera fuerza lateral cuando apunta en una dirección ligeramente diferente a la dirección en la que se mueve su punto de contacto con el suelo. La diferencia entre estas dos direcciones es el slip angle. La cantidad de fuerza lateral que un neumático puede generar depende de varios factores, incluyendo su slip angle y, de manera muy importante, la carga vertical que soporta.
Durante una curva a alta velocidad, hay una transferencia de carga lateral: el peso del coche se desplaza hacia el exterior de la curva, aumentando la carga vertical sobre los neumáticos exteriores y reduciendo la de los interiores. Un neumático con mayor carga vertical puede generalmente generar una mayor fuerza lateral máxima, y a menudo alcanza esa fuerza máxima con un slip angle mayor.
Ackermann vs. Anti-Ackermann (o Ackermann Inverso)
Considerando la carga vertical y los slip angles, en un coche de carreras de alta velocidad, la rueda exterior (más cargada) puede operar óptimamente con un slip angle mayor que la rueda interior (menos cargada). Para lograr esto, la geometría de dirección debe hacer que la rueda exterior gire *más* que la rueda interior, o que tenga un slip angle mayor para el mismo ángulo de giro total. Esto es exactamente lo opuesto al principio de Ackermann de baja velocidad.
Este diseño se conoce como Anti-Ackermann o Ackermann inverso. En un sistema Anti-Ackermann, al girar, la rueda exterior gira con un ángulo (medido respecto al eje transversal) ligeramente mayor que la rueda interior. Esto se hace deliberadamente para optimizar los slip angles de ambos neumáticos delanteros, permitiendo que ambos operen cerca de su pico de generación de fuerza lateral en las condiciones de alta velocidad y alta carga de una curva de competición. El objetivo ya no es la rodadura pura, sino la máxima adherencia lateral.
Es importante notar que la mayoría de los coches de carreras no operan con un 100% de Anti-Ackermann en todas las situaciones. El nivel de Ackermann (o Anti-Ackermann) es un compromiso de diseño calibrado para las condiciones específicas de la pista, el tipo de coche y los neumáticos utilizados. Se suele expresar como un porcentaje, donde 100% es Ackermann puro, 0% es que las ruedas delanteras giran paralelas entre sí, y un porcentaje negativo indica Anti-Ackermann.
El Nivel de Ackermann: Un Compromiso de Diseño
La elección del nivel óptimo de Ackermann (o Anti-Ackermann) para un vehículo es una tarea compleja para los ingenieros. Depende de múltiples factores:
- Tipo de Vehículo: Un coche de calle prioriza la suavidad y el desgaste a baja velocidad (alto Ackermann). Un coche de Fórmula 1 que negocia curvas rápidas prioriza la máxima adherencia a alta velocidad (puede usar Anti-Ackermann). Un coche de karting con curvas muy cerradas podría necesitar un Ackermann significativo.
- Características de la Pista: Pistas con muchas curvas lentas y cerradas pueden beneficiarse de más Ackermann. Pistas con curvas rápidas y fluidas favorecen el Anti-Ackermann.
- Características de los Neumáticos: La relación entre carga vertical, slip angle y fuerza lateral de los neumáticos es fundamental. Los ingenieros estudian la "Línea de Picos" de los neumáticos (el slip angle en el que alcanzan su fuerza lateral máxima para diferentes cargas) para determinar los slip angles óptimos para las ruedas interiores y exteriores.
- Velocidad de Operación: El Ackermann es más relevante a baja velocidad; los slip angles dominan a alta velocidad. El diseño debe encontrar un equilibrio o incluso variar dinámicamente la geometría si es posible (aunque esto es muy complejo).
Los diseñadores calculan la "convergencia dinámica" (la diferencia de ángulo entre las ruedas delanteras) necesaria en función del radio de giro y la velocidad esperada, y diseñan la geometría de la dirección (la posición de los pivotes y las barras de acoplamiento) para aproximarse lo mejor posible a esta curva ideal. A menudo hay que hacer compromisos debido a limitaciones de espacio y otros factores cinemáticos.
Factores Adicionales en la Geometría de Dirección
Además del principio básico de Ackermann, otros factores influyen en el ángulo real de las ruedas durante la conducción:
- Bump Steer: Es el cambio en el ángulo de dirección de una rueda causado por el movimiento vertical de la suspensión (por ejemplo, al pasar sobre un bache o al comprimirse la suspensión en una curva debido a la carga o el balanceo). Un bump steer cuidadosamente diseñado puede complementar la geometría Ackermann/Anti-Ackermann deseada.
- Flexibilidad de Componentes (Compliance): Ningún componente de la suspensión o dirección es perfectamente rígido. La flexibilidad en los bujes, brazos y otros elementos puede causar pequeños cambios en el ángulo de las ruedas bajo carga. Un buen diseño debe tener en cuenta esta flexibilidad para predecir con precisión el comportamiento de la dirección.
Estos factores, junto con la geometría Ackermann, se combinan para determinar el comportamiento final de la dirección de un vehículo en diferentes condiciones.
Preguntas Frecuentes sobre el Principio de Ackermann
¿Todos los coches tienen geometría Ackermann?
La gran mayoría de los vehículos de carretera utilizan la geometría Ackermann o una modificación de ella para mejorar la maniobrabilidad y reducir el desgaste de los neumáticos a bajas velocidades. Los coches de carreras pueden usar Anti-Ackermann para optimizar la adherencia a alta velocidad.
¿Puedo modificar la geometría Ackermann de mi coche?
Sí, es posible modificar la geometría de dirección cambiando la longitud o la posición de las barras de acoplamiento o los puntos de pivote. Sin embargo, esto es una modificación avanzada que debe ser realizada por expertos, ya que un ajuste incorrecto puede comprometer seriamente la seguridad, el manejo y el desgaste de los neumáticos del vehículo.
¿Cómo afecta el Ackermann al desgaste de los neumáticos?
Una geometría Ackermann correcta minimiza el deslizamiento lateral de los neumáticos durante los giros a baja velocidad, lo que reduce el desgaste. Una geometría incorrecta (demasiado o muy poco Ackermann para la aplicación) puede causar un desgaste prematuro e irregular de los neumáticos.
¿Es lo mismo Ackermann que el ángulo de caída (camber) o convergencia (toe)?
No, son ajustes diferentes de la alineación de las ruedas. El ángulo de caída es la inclinación de la rueda vista desde el frente. La convergencia (toe) es si las ruedas de un eje apuntan ligeramente hacia adentro o hacia afuera cuando el coche va recto. El Ackermann se refiere a la diferencia en el ángulo de giro de las ruedas delanteras *cuando se está girando*.
¿Por qué se llama Ackermann si Lankensperger lo inventó?
Rudolf Ackermann patentó y comercializó el sistema en Inglaterra, lo que le dio reconocimiento internacional y asoció su nombre al principio, a pesar de que Georg Lankensperger fue el diseñador original.
Conclusión
El principio de dirección de Ackermann es un ejemplo brillante de cómo la geometría simple puede resolver un problema complejo en la mecánica automotriz. Desde los carruajes de caballos hasta los coches deportivos más avanzados, asegurar que las ruedas delanteras giren con los ángulos correctos es fundamental para el comportamiento del vehículo. Si bien para el conductor promedio el sistema funciona de manera invisible, su correcto funcionamiento es la base de una dirección suave, un desgaste reducido de los neumáticos y una maniobrabilidad eficiente en el día a día. En el mundo de la competición, este principio evoluciona hacia el Anti-Ackermann, demostrando la adaptabilidad y la importancia continua de esta geometría para optimizar el rendimiento en las condiciones más extremas. La geometría de dirección es una disciplina clave en el diseño automotriz.
Si quieres conocer otros artículos parecidos a Geometría Ackermann: El Secreto del Giro puedes visitar la categoría Mecanica.