01/11/2022
La llegada de los vehículos autónomos representa una de las mayores revoluciones en la historia del transporte desde la invención del motor de combustión interna. Estos vehículos, capaces de percibir su entorno y navegar sin intervención humana, no son producto de una única tecnología milagrosa, sino de la convergencia sofisticada de múltiples sistemas. En el corazón de su capacidad para 'ver' y 'entender' el mundo se encuentra una compleja red de sensores, cada uno con sus fortalezas y debilidades, trabajando en conjunto para crear una imagen tridimensional y dinámica del entorno. Paralelamente, tecnologías avanzadas como la inteligencia artificial procesan esta vasta cantidad de datos para tomar decisiones en tiempo real, permitiendo que el vehículo se desplace de manera segura y eficiente.
¿Qué Sensores Utiliza un Vehículo Autónomo?
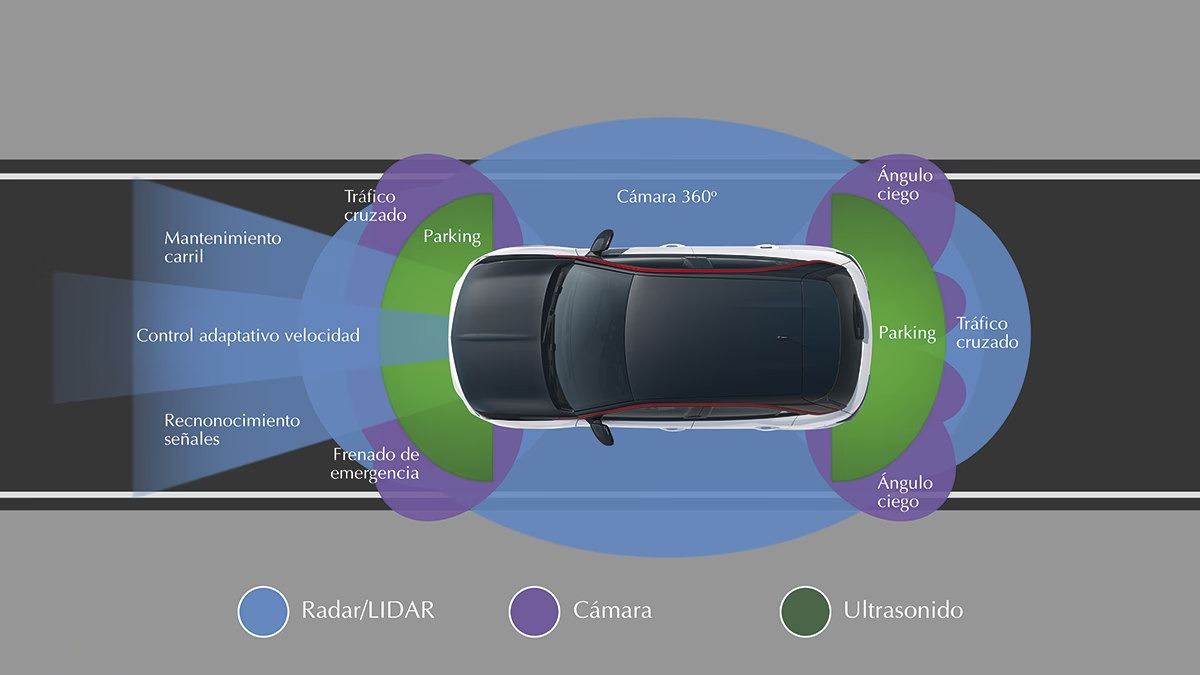
Para operar de forma segura, un vehículo autónomo debe tener una comprensión completa y continua de su entorno. Esto se logra mediante el uso de una variedad de sensores que funcionan de manera complementaria. Cada tipo de sensor ofrece información diferente y opera bajo principios físicos distintos, lo que permite al sistema fusionar datos para obtener una percepción robusta que es más fiable que la de cualquier sensor por sí solo.
LiDAR (Light Detection and Ranging)
El LiDAR es quizás uno de los sensores más emblemáticos asociados a los vehículos autónomos de alto nivel. Funciona emitiendo pulsos de luz láser y midiendo el tiempo que tardan en rebotar en los objetos cercanos. Al hacer esto millones de veces por segundo y en diferentes direcciones, el LiDAR crea una 'nube de puntos' tridimensional extremadamente precisa del entorno. Esta nube de puntos permite al vehículo determinar la forma, el tamaño y la distancia de los objetos, así como mapear el entorno con gran detalle. Los sistemas LiDAR pueden variar en su alcance, resolución y número de 'capas' o haces láser que emiten (desde unos pocos hasta cientos), lo que afecta la densidad y precisión de la nube de puntos generada. Son excelentes para mapear el entorno y detectar objetos con alta precisión espacial, aunque pueden verse afectados por condiciones climáticas adversas como la niebla o la lluvia intensa.
Radar (Radio Detection and Ranging)
El Radar utiliza ondas de radio para detectar objetos y medir su distancia, velocidad y ángulo relativo. A diferencia del LiDAR y las cámaras, el radar es mucho menos susceptible a las condiciones climáticas adversas como lluvia, niebla o nieve, y puede penetrar ciertas barreras no metálicas. Esto lo hace invaluable para detectar vehículos, peatones u otros obstáculos a distancias mayores y en condiciones de baja visibilidad. Los sistemas de radar suelen operar en diferentes frecuencias (por ejemplo, 24 GHz o 77 GHz para aplicaciones automotrices) y pueden ser de corto, medio o largo alcance. Su principal limitación es que no proporcionan una imagen detallada del entorno, sino información más básica sobre la presencia y el movimiento de objetos. Son cruciales para sistemas de control de crucero adaptativo y frenado de emergencia.
Cámaras
Las cámaras son esenciales para que un vehículo autónomo pueda 'ver' el mundo de manera similar a como lo hacemos los humanos. Capturan imágenes y vídeo del entorno, proporcionando información rica sobre colores, texturas y detalles. Utilizando técnicas de visión por computadora e inteligencia artificial, el vehículo puede procesar estas imágenes para identificar y clasificar objetos (como otros vehículos, peatones, ciclistas, señales de tráfico, semáforos, marcas viales), leer texto (como letreros de calles) y estimar distancias a través de cámaras estéreo. Se utilizan múltiples cámaras típicamente para proporcionar una cobertura de 360 grados alrededor del vehículo. Aunque son económicas y proporcionan datos visuales detallados, su rendimiento se ve fuertemente afectado por la iluminación (noche, contraluz, túneles) y las condiciones climáticas (lluvia intensa, nieve, niebla).
Sensores Ultrasónicos
Los sensores ultrasónicos emiten ondas sonoras de alta frecuencia y miden el tiempo que tardan en regresar tras rebotar en un objeto. Son sensores de corto alcance (típicamente hasta unos pocos metros) y son excelentes para detectar objetos muy cercanos al vehículo. Su principal aplicación en vehículos autónomos y sistemas avanzados de asistencia al conductor (ADAS) es en maniobras a baja velocidad, como el estacionamiento asistido o la detección de obstáculos en puntos ciegos durante cambios de carril a baja velocidad. Son relativamente económicos y fiables para distancias cortas, pero su alcance limitado y susceptibilidad al ruido los hacen inadecuados para la detección de largo alcance o la navegación a alta velocidad.
GPS e IMU (Unidad de Medición Inercial)
Aunque no son sensores de percepción directa del entorno en el mismo sentido que los anteriores, el GPS (Sistema de Posicionamiento Global) y la IMU son fundamentales para que el vehículo conozca su propia posición, orientación y movimiento. El GPS proporciona la ubicación global del vehículo, aunque su precisión puede verse afectada en entornos urbanos densos (cañones urbanos) o túneles. La IMU, que típicamente incluye acelerómetros y giroscopios, mide las fuerzas y rotaciones que experimenta el vehículo, permitiendo estimar su posición, velocidad y orientación incluso cuando la señal de GPS se pierde temporalmente. La fusión de datos del GPS y la IMU, a menudo combinada con información de otros sensores (como odometría de las ruedas), es crucial para la localización y el mapeo simultáneos (SLAM) y para mantener un seguimiento preciso de la posición del vehículo en el mapa de alta definición.
¿Qué Tecnologías Usan los Vehículos Autónomos?
Más allá de los sensores de percepción, los vehículos autónomos dependen de un conjunto integrado de tecnologías para procesar la información, tomar decisiones y ejecutar acciones.
Inteligencia Artificial y Aprendizaje Automático
La inteligencia artificial (IA) y el aprendizaje automático (Machine Learning, ML) son el cerebro detrás del vehículo autónomo. Algoritmos avanzados procesan los datos brutos de todos los sensores (fusión de sensores), interpretan el entorno (percepción), predicen el comportamiento de otros actores en la vía (predicción), planifican una trayectoria segura y eficiente (planificación) y envían comandos a los actuadores del vehículo (control) para dirigirlo, acelerarlo o frenarlo. Las redes neuronales profundas, en particular, han sido fundamentales para mejorar la capacidad de los vehículos para reconocer objetos en imágenes (visión por computadora) y procesar datos complejos de LiDAR y radar.
Mapeo de Alta Definición (HD Maps)
Los vehículos autónomos de niveles superiores a menudo utilizan mapas digitales extremadamente detallados y precisos, conocidos como mapas HD. Estos mapas contienen información estática y dinámica del entorno que va mucho más allá de un mapa GPS estándar, incluyendo la posición exacta de carriles, señales de tráfico, bordillos, elementos del mobiliario urbano e incluso la textura de la carretera. El vehículo utiliza estos mapas como contexto para ayudar a la localización precisa y a la planificación de la ruta, complementando la información en tiempo real de los sensores.
Conectividad (V2X)
La comunicación vehículo a vehículo (V2V), vehículo a infraestructura (V2I) y vehículo a todo (V2X) es una tecnología emergente que permitirá a los vehículos autónomos compartir información entre sí y con la infraestructura vial (como semáforos inteligentes o señales). Esto puede mejorar significativamente la seguridad y la eficiencia al permitir que los vehículos anticipen situaciones de tráfico, reciban advertencias sobre peligros ocultos o coordinen el movimiento en intersecciones.
Potencia de Procesamiento
Procesar y fusionar los datos de múltiples sensores en tiempo real, ejecutar complejos algoritmos de IA y tomar decisiones en fracciones de segundo requiere una potencia de cómputo considerable. Los vehículos autónomos están equipados con potentes computadoras a bordo, a menudo utilizando hardware especializado como unidades de procesamiento gráfico (GPU) o procesadores diseñados específicamente para IA, capaces de manejar la enorme carga de trabajo computacional.
Impacto en la Gestión de Flotas
La integración de vehículos autónomos y sus tecnologías asociadas está redefiniendo la gestión de flotas. Los retos tradicionales de eficiencia, seguridad y sostenibilidad están siendo abordados con soluciones innovadoras:
- Eficiencia Operacional: Los vehículos autónomos pueden operar las 24 horas del día, los 7 días de la semana, con pausas mínimas (solo para recarga o mantenimiento). La planificación algorítmica de rutas optimiza el consumo de combustible y reduce los tiempos de viaje.
- Seguridad Mejorada: La eliminación del factor humano en la conducción, la percepción constante del entorno por parte de los sensores y la reacción más rápida de los sistemas autónomos pueden reducir drásticamente el número de accidentes causados por errores del conductor, fatiga o distracciones.
- Análisis Avanzado de Datos: Los vehículos autónomos generan una cantidad masiva de datos sobre la conducción, el entorno, el estado del vehículo y el comportamiento del sistema autónomo. Estos datos son invaluables para la gestión de flotas, permitiendo análisis predictivos sobre mantenimiento, optimización de operaciones y mejora continua del rendimiento de la flota.
- Automatización de Procesos: Tareas como el estacionamiento, la carga y descarga (en entornos controlados) o el movimiento dentro de depósitos pueden ser automatizadas, liberando al personal para otras funciones de mayor valor.
- Monitoreo Remoto y Mantenimiento Predictivo: La conectividad y los datos generados permiten el monitoreo en tiempo real del estado y la ubicación de cada vehículo de la flota. Los algoritmos pueden predecir fallos potenciales antes de que ocurran, permitiendo un mantenimiento proactivo que minimiza el tiempo de inactividad.
- Optimización de Recursos: Una mejor planificación y utilización de los vehículos, junto con la reducción de accidentes y el mantenimiento predictivo, lleva a una optimización significativa de los costos operativos y de capital.
La transición a flotas autónomas no es solo un cambio tecnológico, sino una transformación completa de los modelos operativos, donde la toma de decisiones basada en datos y la automatización juegan un papel central.

Tabla Comparativa de Sensores Principales
| Sensor | Principio | Alcance Típico | Rendimiento en Clima Adverso | Ventajas Clave | Desventajas Clave |
|---|---|---|---|---|---|
| LiDAR | Luz Láser | Medio a Largo (hasta 200+ m) | Sensible a Niebla/Lluvia Intensa | Mapeo 3D preciso, Detección de forma detallada | Costo elevado, Afectado por clima |
| Radar | Ondas de Radio | Medio a Largo (hasta 250+ m) | Bueno (penetra Niebla/Lluvia) | Detección de distancia y velocidad, Robusto en clima | Baja resolución espacial, Dificultad para clasificar objetos |
| Cámaras | Luz Visible | Corto a Medio (hasta 150+ m) | Sensible a Iluminación/Clima | Identificación y clasificación de objetos, Detección de señales/texto | Afectado por luz y clima, No mide distancia directamente (sin estéreo) |
| Ultrasónico | Ondas Sonoras | Muy Corto (hasta ~5 m) | Afectado por ruido y viento | Detección de proximidad, Bajo costo | Alcance muy limitado, Baja resolución |
| GPS/IMU | Satélites/Inercia | Global | GPS afectado en túneles/urbanos; IMU susceptible a deriva | Localización global, Seguimiento de movimiento | GPS impreciso sin corrección; IMU necesita recalibración |
Preguntas Frecuentes
¿Qué sensores utiliza un vehículo autónomo?
Los vehículos autónomos utilizan una combinación de sensores como LiDAR, Radar, Cámaras, Sensores Ultrasónicos, y sistemas de posicionamiento como GPS e IMU para percibir su entorno.
¿Qué son los sensores ultrasónicos utilizados en los vehículos autónomos?
Los sensores ultrasónicos son dispositivos de corto alcance que emiten ondas sonoras para detectar la presencia y distancia de objetos muy cercanos, siendo útiles principalmente para maniobras a baja velocidad como el estacionamiento.
¿Qué tecnologías usan los vehículos autónomos?
Además de los sensores, los vehículos autónomos dependen de tecnologías como la inteligencia artificial y el aprendizaje automático para procesar datos y tomar decisiones, mapeo de alta definición, conectividad (V2X) y potentes sistemas de procesamiento a bordo.
¿Cómo trabajan juntos los diferentes sensores?
Los datos de todos los sensores se fusionan en un modelo coherente del entorno. Por ejemplo, el LiDAR proporciona un mapa 3D preciso, las cámaras identifican el tipo de objetos, el radar detecta su velocidad y distancia en condiciones de poca visibilidad, y los ultrasónicos ayudan en maniobras cercanas. La IA procesa esta información combinada para una percepción robusta.
¿Cuál es el principal desafío para los sensores en vehículos autónomos?
Uno de los mayores desafíos es lograr un rendimiento fiable de los sensores en todas las condiciones ambientales posibles (lluvia intensa, niebla, nieve, polvo, luz solar directa, oscuridad) y en escenarios de conducción complejos y dinámicos.
En conclusión, la capacidad de los vehículos autónomos para operar de forma segura y eficaz depende de una intrincada red de sensores que les permiten percibir el mundo, combinada con potentes tecnologías de procesamiento e inteligencia artificial que interpretan esa información y toman decisiones. Esta convergencia tecnológica no solo promete transformar la experiencia de conducción individual, sino que está sentando las bases para una revolución en la gestión de flotas, prometiendo mayor eficiencia, seguridad y sostenibilidad en el transporte del futuro.
Si quieres conocer otros artículos parecidos a Sensores y Tecnología Clave en Vehículos Autónomos puedes visitar la categoría Automóviles.